Environment Setup [Ubuntu 16.04, 18.04]
Note: If you have already finished installing PyTorch C++ API, please skip this section.
Download
libtorch:- CPU Version:
wget https://download.pytorch.org/libtorch/cpu/libtorch-shared-with-deps-latest.zip -O libtorch.zip - GPU Version (CUDA 9.0):
wget https://download.pytorch.org/libtorch/cu90/libtorch-shared-with-deps-latest.zip -O libtorch.zip - GPU Version (CUDA 10.0):
wget https://download.pytorch.org/libtorch/cu100/libtorch-shared-with-deps-latest.zip
- CPU Version:
Unzip
libtorch.zip:unzip libtorch.zip
We’ll use the absolute path of extracted directory (libtorch) later on.
Implementation
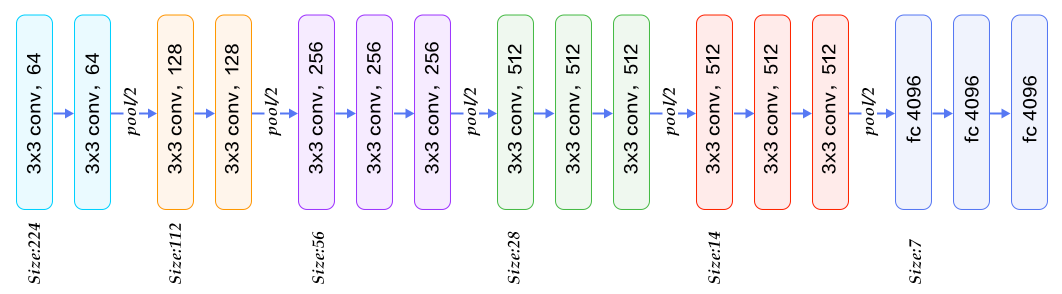
The VGG-16 Network is shown in the Figure below.
We’ll start of by first including libtorch header file.
#include <torch/torch.h>
We’ll then go ahead and define the network. We’ll inherit layers from torch::nn::Module.
/* Sample code for training a FCN on MNIST dataset using PyTorch C++ API */
/* This code uses VGG-16 Layer Network */
struct Net: torch::nn::Module {
// VGG-16 Layer
// conv1_1 - conv1_2 - pool 1 - conv2_1 - conv2_2 - pool 2 - conv3_1 - conv3_2 - conv3_3 - pool 3 -
// conv4_1 - conv4_2 - conv4_3 - pool 4 - conv5_1 - conv5_2 - conv5_3 - pool 5 - fc6 - fc7 - fc8
// Note: pool 5 not implemented as no need for MNIST dataset
Net() {
// Initialize VGG-16
// On how to pass strides and padding: https://github.com/pytorch/pytorch/issues/12649#issuecomment-430156160
conv1_1 = register_module("conv1_1", torch::nn::Conv2d(torch::nn::Conv2dOptions(1, 10, 3).padding(1)));
conv1_2 = register_module("conv1_2", torch::nn::Conv2d(torch::nn::Conv2dOptions(10, 20, 3).padding(1)));
// Insert pool layer
conv2_1 = register_module("conv2_1", torch::nn::Conv2d(torch::nn::Conv2dOptions(20, 30, 3).padding(1)));
conv2_2 = register_module("conv2_2", torch::nn::Conv2d(torch::nn::Conv2dOptions(30, 40, 3).padding(1)));
// Insert pool layer
conv3_1 = register_module("conv3_1", torch::nn::Conv2d(torch::nn::Conv2dOptions(40, 50, 3).padding(1)));
conv3_2 = register_module("conv3_2", torch::nn::Conv2d(torch::nn::Conv2dOptions(50, 60, 3).padding(1)));
conv3_3 = register_module("conv3_3", torch::nn::Conv2d(torch::nn::Conv2dOptions(60, 70, 3).padding(1)));
// Insert pool layer
conv4_1 = register_module("conv4_1", torch::nn::Conv2d(torch::nn::Conv2dOptions(70, 80, 3).padding(1)));
conv4_2 = register_module("conv4_2", torch::nn::Conv2d(torch::nn::Conv2dOptions(80, 90, 3).padding(1)));
conv4_3 = register_module("conv4_3", torch::nn::Conv2d(torch::nn::Conv2dOptions(90, 100, 3).padding(1)));
// Insert pool layer
conv5_1 = register_module("conv5_1", torch::nn::Conv2d(torch::nn::Conv2dOptions(100, 110, 3).padding(1)));
conv5_2 = register_module("conv5_2", torch::nn::Conv2d(torch::nn::Conv2dOptions(110, 120, 3).padding(1)));
conv5_3 = register_module("conv5_3", torch::nn::Conv2d(torch::nn::Conv2dOptions(120, 130, 3).padding(1)));
// Insert pool layer
fc1 = register_module("fc1", torch::nn::Linear(130, 50));
fc2 = register_module("fc2", torch::nn::Linear(50, 20));
fc3 = register_module("fc3", torch::nn::Linear(20, 10));
}
// Implement Algorithm
torch::Tensor forward(torch::Tensor x) {
x = torch::relu(conv1_1->forward(x));
x = torch::relu(conv1_2->forward(x));
x = torch::max_pool2d(x, 2);
x = torch::relu(conv2_1->forward(x));
x = torch::relu(conv2_2->forward(x));
x = torch::max_pool2d(x, 2);
x = torch::relu(conv3_1->forward(x));
x = torch::relu(conv3_2->forward(x));
x = torch::relu(conv3_3->forward(x));
x = torch::max_pool2d(x, 2);
x = torch::relu(conv4_1->forward(x));
x = torch::relu(conv4_2->forward(x));
x = torch::relu(conv4_3->forward(x));
x = torch::max_pool2d(x, 2);
x = torch::relu(conv5_1->forward(x));
x = torch::relu(conv5_2->forward(x));
x = torch::relu(conv5_3->forward(x));
x = x.view({-1, 130});
x = torch::relu(fc1->forward(x));
x = torch::relu(fc2->forward(x));
x = fc3->forward(x);
return torch::log_softmax(x, 1);
}
// Declare layers
torch::nn::Conv2d conv1_1{nullptr};
torch::nn::Conv2d conv1_2{nullptr};
torch::nn::Conv2d conv2_1{nullptr};
torch::nn::Conv2d conv2_2{nullptr};
torch::nn::Conv2d conv3_1{nullptr};
torch::nn::Conv2d conv3_2{nullptr};
torch::nn::Conv2d conv3_3{nullptr};
torch::nn::Conv2d conv4_1{nullptr};
torch::nn::Conv2d conv4_2{nullptr};
torch::nn::Conv2d conv4_3{nullptr};
torch::nn::Conv2d conv5_1{nullptr};
torch::nn::Conv2d conv5_2{nullptr};
torch::nn::Conv2d conv5_3{nullptr};
torch::nn::Linear fc1{nullptr}, fc2{nullptr}, fc3{nullptr};
};
Once done, we can go ahead and test the network on our sample dataset. Let’s go ahead and load data first. We’ll be using 10 epochs, learning rate (0.01), and nll_loss as loss functio.
int main() {
// Create multi-threaded data loader for MNIST data
auto data_loader = torch::data::make_data_loader<torch::data::samplers::SequentialSampler>(
std::move(torch::data::datasets::MNIST("/absolute/path/to/data").map(torch::data::transforms::Normalize<>(0.13707, 0.3081)).map(
torch::data::transforms::Stack<>())), 64);
// Build VGG-16 Network
auto net = std::make_shared<Net>();
torch::optim::SGD optimizer(net->parameters(), 0.01); // Learning Rate 0.01
// net.train();
for(size_t epoch=1; epoch<=10; ++epoch) {
size_t batch_index = 0;
// Iterate data loader to yield batches from the dataset
for (auto& batch: *data_loader) {
// Reset gradients
optimizer.zero_grad();
// Execute the model
torch::Tensor prediction = net->forward(batch.data);
// Compute loss value
torch::Tensor loss = torch::nll_loss(prediction, batch.target);
// Compute gradients
loss.backward();
// Update the parameters
optimizer.step();
// Output the loss and checkpoint every 100 batches
if (++batch_index % 2 == 0) {
std::cout << "Epoch: " << epoch << " | Batch: " << batch_index
<< " | Loss: " << loss.item<float>() << std::endl;
torch::save(net, "net.pt");
}
}
}
}
For code, check out my repo here: https://github.com/krshrimali/Digit-Recognition-MNIST-SVHN-PyTorch-CPP
In the next blog, we will discuss about another network on MNIST and SVHN Dataset.